![[灵蜂智能官网]-专业红外热像仪厂家](http://linfun.com.cn/wp-content/uploads/2022/06/2022060807191642.png)
![[灵蜂智能官网]-专业红外热像仪厂家](http://linfun.com.cn/wp-content/uploads/2021/10/202110130602107.png)
电力系统是一个集多学科技术应用的综合性系统,在当前电网规模不断扩大的背景下,电网的运营和维护成为了电网管理中必须重点考虑的问题。巡检是电网运维工作中十分重要的一环,而传统的以人工为主的变电站巡检模式不仅耗费人力物力,而且安全性也难以得到保证,显然已经不能再适应当前的电网发展需求。为此,各种高新技术纷纷被引进到电网的管理中,其中红外热成像巡检机器人就是最具代表性的应用案例之一。

图为变电站红外热成像巡检机器人
红外热成像巡检机器人技术是通过智能化设备代替人进行变电站巡检的一种新兴技术,是变电站管理智能化和信息化的重要标志。在当前的实践中,所谓的智能巡检技术实际上是以红外热像仪的应用为代表的。红外热成像巡检机器人的应用较好地解决了人工巡检中安全问题和效率问题,同时在各种参数的检测中比人工巡检具有无可比拟的优势,机器人可以在短时间内完成大范围、多参数、高可靠的巡检任务,大大变电站智能化运营水平。
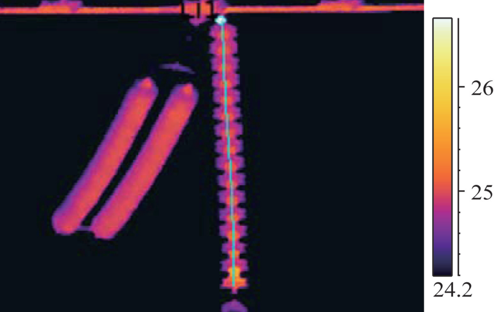
红外热成像巡检机器人作为一个智能化电子系统,可以根据设计者的意愿和实际需求进行功能模块的集成,具有很大的灵活性。但从当前的应用来年看,巡检机器人在变电站中应用最多的功能主要包括红外热成像、路径规划、故障检测、定位导航、远程控制等等。当系统向现场巡检机器人下发任务指令后,机器人需要通过内部算法模块自动进行最优路径的规划,一般需要经过路径搜索、路径筛选和路径模拟实验等步骤,并经过人为的修正后,方可确定实际的巡检路径。故障检测则主要依赖于红外热成像系统的温度检测功能,机器人通过红外测温实时分析各设备的温度分布情况,并对过热的地方进行拍照,同时采集设备发出的故障声音,然后根据预设的条件进行故障分析和定位。定位导航是机器人按照规划路径行进的必要前提,变电站一般采用无轨导航,因此机器人内部实际上是导入了一个GIS地图,也可以自带GPS定位终端,使其可以自主完成定位、前进、拐弯、避障等功能。远程控制是当前变电站巡检机器人必不可少的功能,一方面,当机器人本身出现故障或出现突发情况时,需要由人对其进行远程操控,防止事故发生。另一方面,对于一些较复杂的巡检或维修工作,单靠算法是不现实的,可由技术人员远程协助完成。